AIAC vs. SIAC
Our goal is to solve scientific problems on an architecture composed
of heterogeneous machines, widely distributed and linked by
heterogeneous bandwidth. It is well known that direct methods are,
most of the time, totally inefficient in such a context, since the
total execution time is globally conditioned by the slowest machine
and link. Furthermore, direct methods often use a lot of global
communications (broadcast, gather-scatter, all-to-all, ...), which are
a bottleneck on an heterogeneous network.
In fact, classical iterative methods suffer from the same problems,
sometimes in worst when the convergence is particularly
slow. Fortunately, there exists a class of iterative methods which is
perfectly adapted to our execution context because it greatly reduces
the need of synchronizations.
The two following sections illustrate these two classes of
iterative algorithms: SIAC and AIAC. They show the first iterations of an abstract
application as a Gantt chart, with 3 computing tasks A, B and C. In
each case, we suppose that communications are asynchronous,
that is non-blocking. It means that emission and reception of data can
be done by the system while the application computes. Nevertheless,
the code is based on the message passing paradigm which implies
explicit routine calls to send and receive data from/to an application
buffer.
SIAC stands for Synchronous Iterations, Asynchronous
Communications. It is the classical way to implement parallel
iterative algorithms.
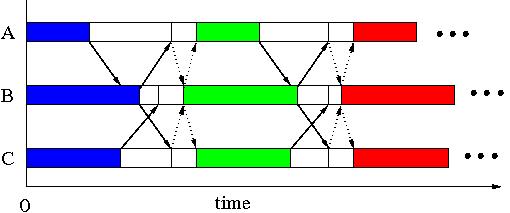
Plain boxes are computing time and white boxes idle times. Plain
arrows represent the communications done at the end of each iteration
to update the data of the neighbors. Dotted arrows represent the
gather-scatter needed to check if the global convergence has been
reached at the end of the current iteration. Obviously this test must
be done after the data update, and at the end of each iteration. It
leads to a lot of global communications and idle times.
back to top.
AIAC stands for Asynchronous Iterations, Asynchronous
Communications.
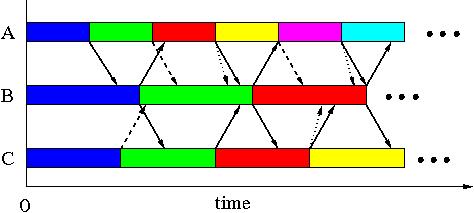
Plain boxes are computing time. Plain or hashed arrows represent
the communications done at the end of each iteration to update the
data of the neighbors. Dotted arrows represent communications
concerning the local convergence state of a task. As we can see, the
execution scheme is totally different from a SIAC since there are no
idle times and global communications. Here is the sketch in three
points:
- asynchronism : a task always starts a new iteration even
if it did not receive data from its neighbors. For example, A
receives data from B only during its third iteration.
- message crushing : if a task X receives several messages
from the same task Y, concerning the same data to update, X can update
with only the most recent message and crush the older ones. This
mechanism is not mandatory but it greatly accelerates the convergence
rate. For example, B receives two messages from A during its second
iteration. The first one may be discarded (= hashed arrow).
- asynchronous convergence detection : as in SIAC, a task X
is chosen to store (in an array) the convergence state of all
tasks. Nevertheless, a task Y sends its convergence state only when
it changes. At the end of each iteration, X checks for
"convergence messages" from other tasks. If there are, it updates the
array and checks if the convergence state of all tasks is true. If it
is the case, the global convergence has been reached. If this state
persists during few iterations, X warns all tasks to stop.
For example, we suppose that A converges locally at the end of its
third iteration. Then it sends a message to B. C does the same at the
end of its third iteration. But A steps out its convergence state at
the end of its fifth iteration, then it sends a new message to B to
warn it. And so on until B detects the global convergence and warns A
and C to stop.
Notes:
- Obviously, the same algorithm may be implemented in a SIAC or
AIAC way. But if it is proven that the SIAC version will converge, the
AIAC version may not. Thus, it is not possible to purely and simply
apply AIAC technics to any algorithm.
- Fortunately, the convergence proof can be done by checking some
mathematical properties on the iteration functions and can apply to a
large class of scientific problems such as those described by a linear
system involving M matrices or by partial differential
equations.
- If the convergence is proved, the number of iterations needed to
converge is higher for an AIAC execution than a SIAC
one. Nevertheless, since there are no idle times, the total execution
time is very often reduced, the gain depending on the algorithm, the
data and the execution context.
- AIAC executions are tolerant to message delays (or lost): the
execution keeps going on even if no update data are received.
back to top.
AIAC algorithms is a new way to address the efficiency problem on
a Grid. Linking big clusters with very high speed networks is indeed a
way but, from a pure computation point of view, it is just the same
than using old parallel machines. The real challenge is to use
hundreds of simple machines (even user machines) and to implement more
efficient codes than those existing.
To summarize, it is time to leave the old manners for this credo: "adapt the
algorithm to the Grid and not the opposite".
back to top.